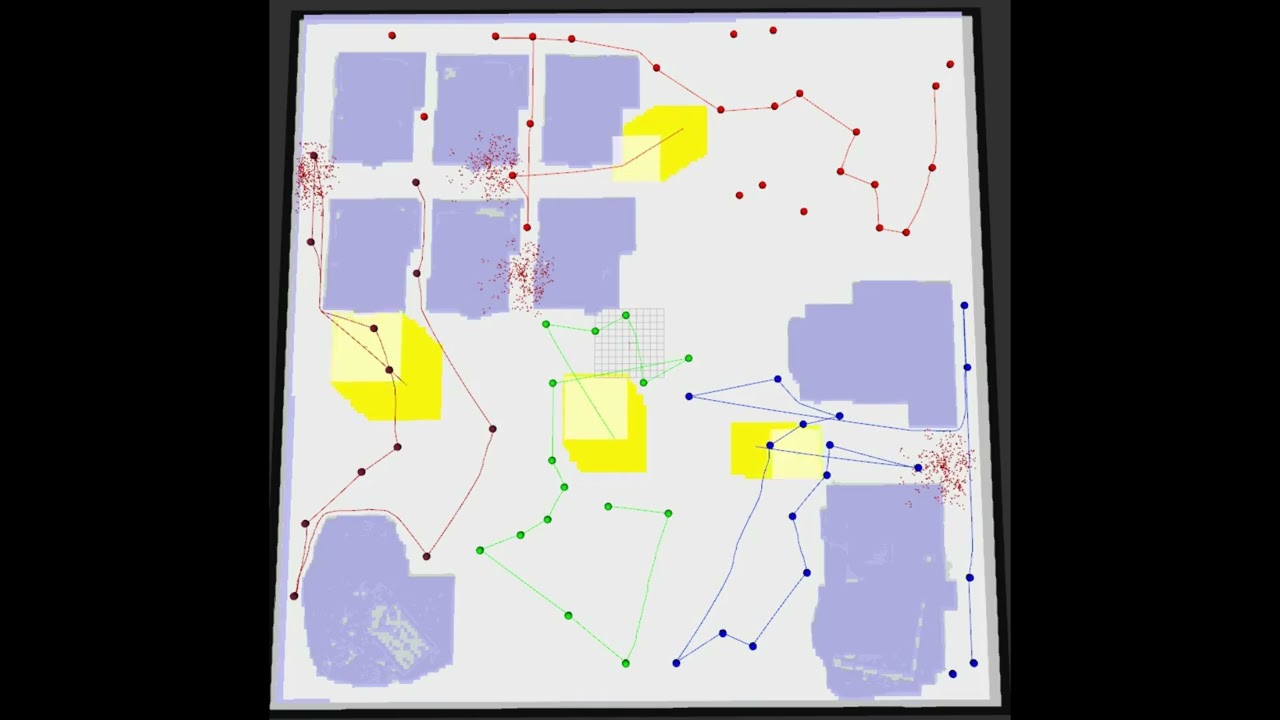
[HSR] Person Following Robot with Active Target SearchThis work addresses a framework for person-following robots using active search. The proposed system is applied to the Toyota Human...