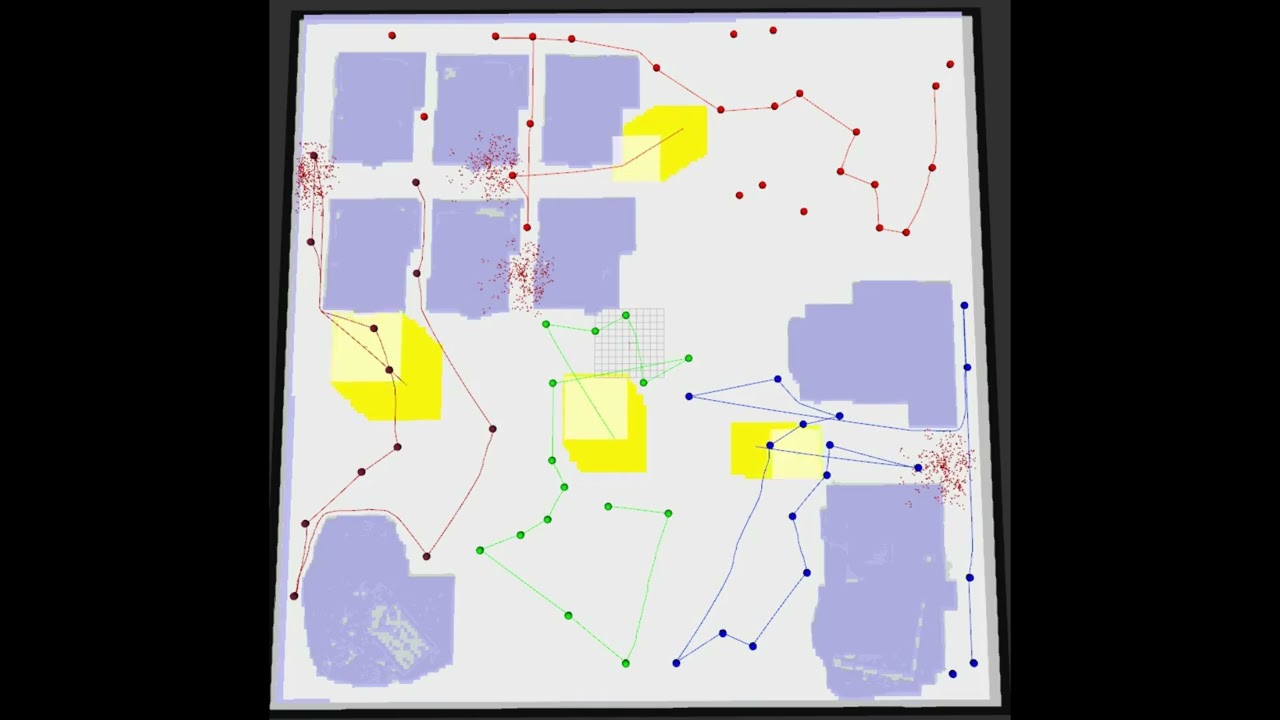
Three robot Search (Two A1s + HSR)
This paper proposes KC-TSS: K-Clustered-Traveling Salesman Based Search, an online path planning algorithm for heterogeneous robot teams...

Information-Theoretic Based Target Search withMultiple Agents
This paper proposes an online path planning and motion generation algorithm for heterogeneous robot teams performing target search in a...